Overview

The Satellite Station’s yagis and rotor assembly
- 2m cross yagi with RHCP/LHCP relay
- 7 elements per plane, ~10ft boom length (approx 12.0 dBiC)
- 70cm cross yagi with RHCP/LHCP relay
- 9 elements per plane, ~6ft boom length (approx 13.3 dBiC)
- G-5500 rotator with 10ft crossboom
- 65ft of LMR-400 each
- FT-897 Transceiver w/ USB CAT control (rigctld w/ PTT)
- Sat688 rotator interface with RS-232 & hamlib (rotctld)
- Soundmodem, GPredict, Ubuntu12 desktop
We’re building a basic OSCAR station with UHF and VHF capabilities. This station relies on a single VHF and single UHF yagi. The station is currently operational and tracking satellites, but also awaiting a few improvements.
We are currently looking for missions to track and assist to prove the station and build up our knowledge.
Details
Hardware
| UHF / VHF Gain (est) | TBD |
| Polarization | Circular |
| Preamplifier | TBD |
| Noise Floor | TBD |
| Gain | TBD |
| Rotor | Yaesu G5500 |
| Vertical Load | 200 kg |
| Torque Az/El | 137 kg m / 59 kg m |
| Break Torque | 392 kg m |
| Coax | LMR-400 |
| dB/100m @ 150MHz | 5.0 |
| dB/100m @ 450MHz | 8.9 |
| Run Length (Est) | 20m |
| Duplexer | CF-4160 |
| Insertion Isolation VHF / UHF | 0.15/60dB / 0.25/60dB |
Antennas
The satellite tracking station uses one 10′ cross-polarized VHF yagi, and one 6′ cross-polarized UHF yagi. They are mounted on an aluminium crossbeam, and spun by a Yaesu G5500 rotor. Boh antennas are mounted so no element is parallel with either the crossbeam or the mast. The entire assembly is held on a non-penetrating roof mount and secured by cinder blocks. TBD preamps may be inserted in the future.
Rotor Controller System
Our current system uses WA8SME’s Sat688 control board to accept EASYCOMM-1 from the computer, and command the Yaesu G5500 rotor controller to the correct position. This system works, but has a few disadvantages that we hope to correct by changing to an Arduino-based rotor control system.
By changing systems, we hope to gain:
- Variable speed control
- Simultaneous Azimuth and Elevation control
- Absolute pointing relative to the earth
Our new system will be based on K3NG’s existing design, and similar to the one to be implemented on the Knudsen Earth Station as well. However, W6YRA’s rotor controller will only use one LSM303 (triple axis accelerometer and magnetometer), and will therefore only have one remote Olimexino connected over network to a master Arduino Mega.
Weatherization

W6YRA’s Satellite Station yagis in the foreground, and HF tri-bander in the backgrond
While weather in Los Angeles is rarely an issue, we still wanted to protect both rotors from rain and direct sun. The elevation rotor is currently protected by an overturned bucket, while the azimuth rotor is underneath a traffic cone. We also make use of self-sealing weather tapes on coax connections. Additionally, all coax and control cables run through a drip loop before entering the room.
Block Diagram

Tracking
Our tracking record is a bit out of date, we’ve since been able to demodulate 9600baud and have been tracking several satellites recently. Hopefully this will be updated soon.
Satellite Tracking
Audibly heard KKS-1, CO-57, CO-65, CO-66, ISS, VO-52, FO-29, and KySat-2
Demodulated 1200 baud packet from ISS
Demodulated 9600 baud packet from CSSWE, Vermont Lunar*, IPEX*, CubeBug-2*
*Awaiting confirmation
We are actively looking for other 9600 baud and 19200 baud satellites to track. If you have suggestions, please let us know.
Balloon Tracking
Arko Robotics’ CUBEX Balloon Payload
Contributed balloon tracking data using RTTY 300 baud on 434.460
Tracked druing the flight on 2014-MAY-24
Telemetry was captured with minimal interruptions from just after launch east of Pasadena to estimated splashdown in the Pacific Ocean
Arko Robotics’ HABEXPico2 Balloon Payload
Contributed balloon tracking data using RTTY 50 baud on 434.500
Tracked from 1058-1211 PST 2013-NOV-27
Burst is estimated at 1211 with probable computer failure due to loss of sensor immediately after
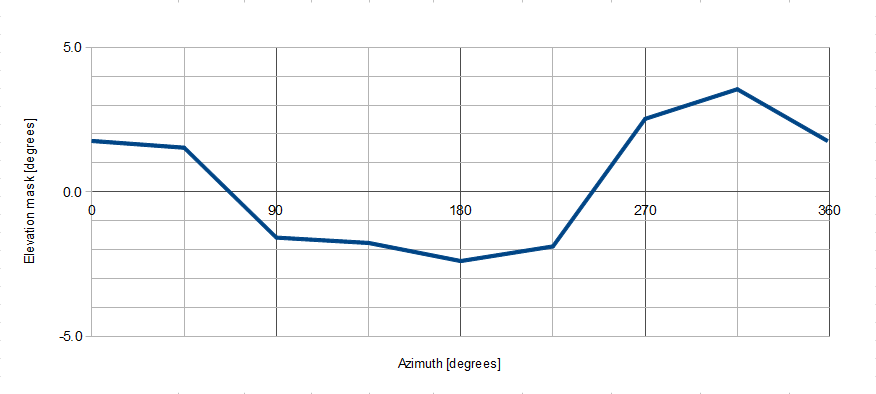
Elevation Mask